Next: Feature Detection Up: Image-Based Cloth Capture Previous: Introduction
[ pdf | chapters | single document ]
Subsections
A number of algorithms were considered for recovery of depth from images. For the purposes of this project, the ideal algorithm would:
Of the available shape recovery algorithms, stereo correspondence comes the closest to meeting these requirements. Correspondence algorithms require textured cloth--not necessarily large-scale patterns, but certainly fine-scale texture, in the form of visible strands or fluff. This limits the range of materials that can be captured; in my tests, cotton T-shirts were often unacceptable, but fluffy teatowels worked quite well. Fine texture could be added in other acceptable ways, however, such as a light spray-paint layer. Stereo correspondence is a passive technique, allows capture of any surface type, and is easy to implement. Its precision is limited, since depth samples are quantised by the capture process.
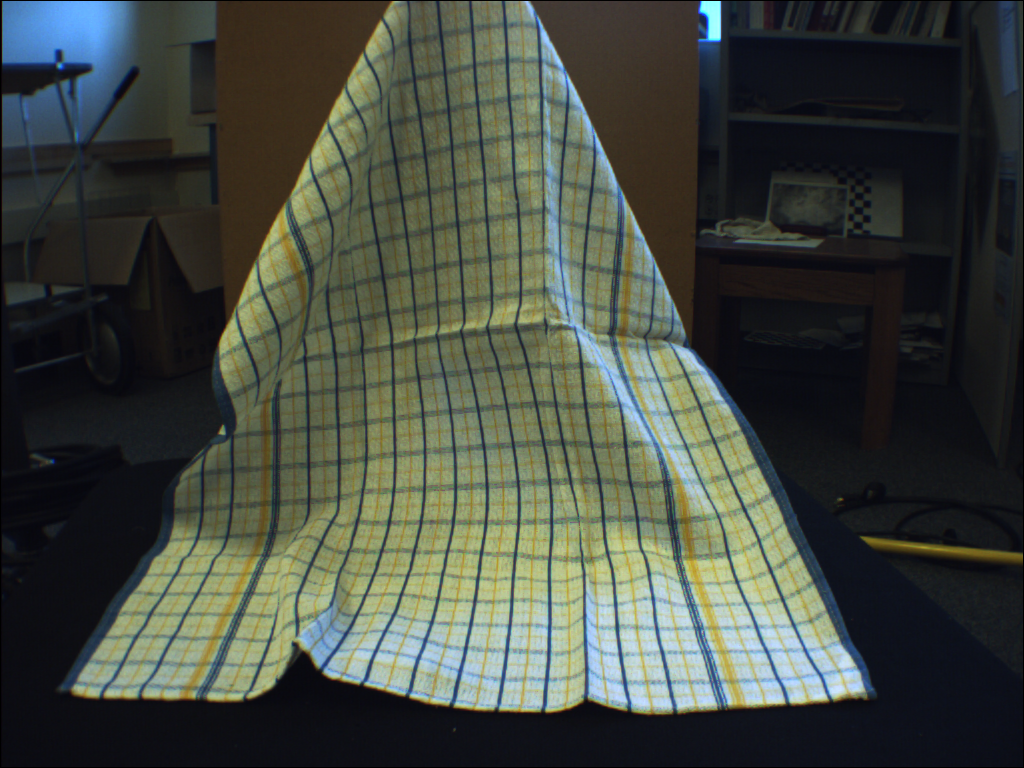
Capture was performed using a Digiclops camera, manufactured by Point Grey Research. Due to limited dynamic range, lighting had to be carefully controlled. Incandescent light produced good results, but indirect natural light seemed did an even better job at depth recovery. White cloth was found to be easier to capture than darker shades. The cloth was suspended by one edge from a stand, and placed against a dark background for easy segmentation. The cloth used was a white cotton teatowel with printed blue and yellow stripes. The vertical stripes were solid, while the horizontal stripes were a mixture of colour and white stitching.
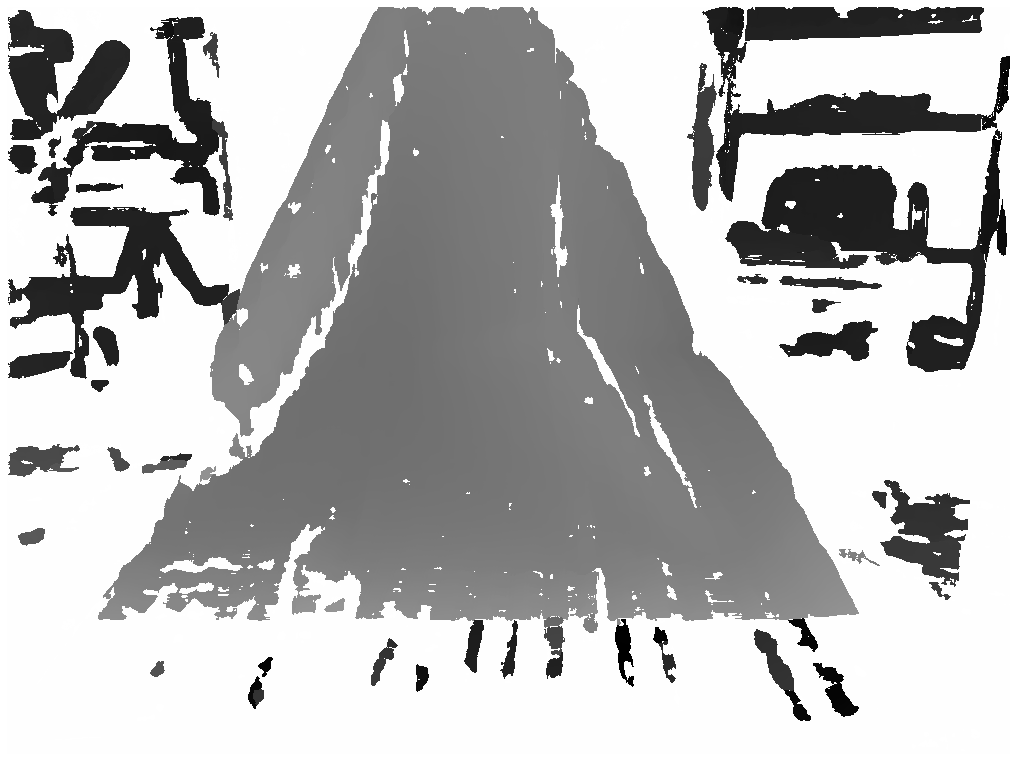
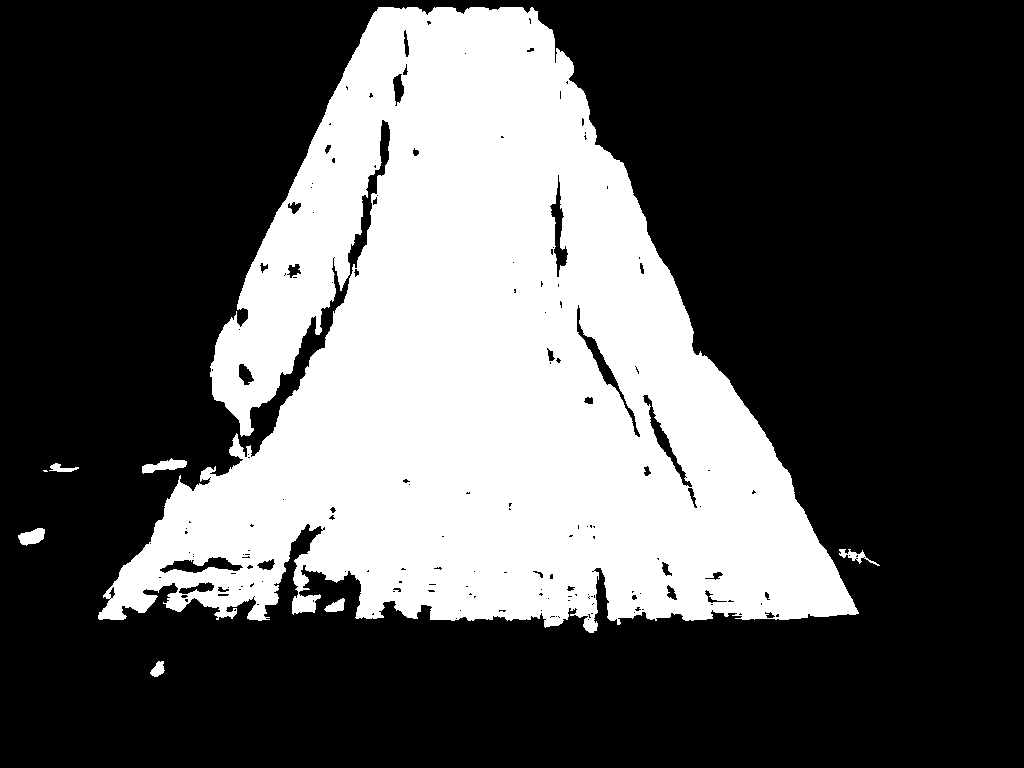
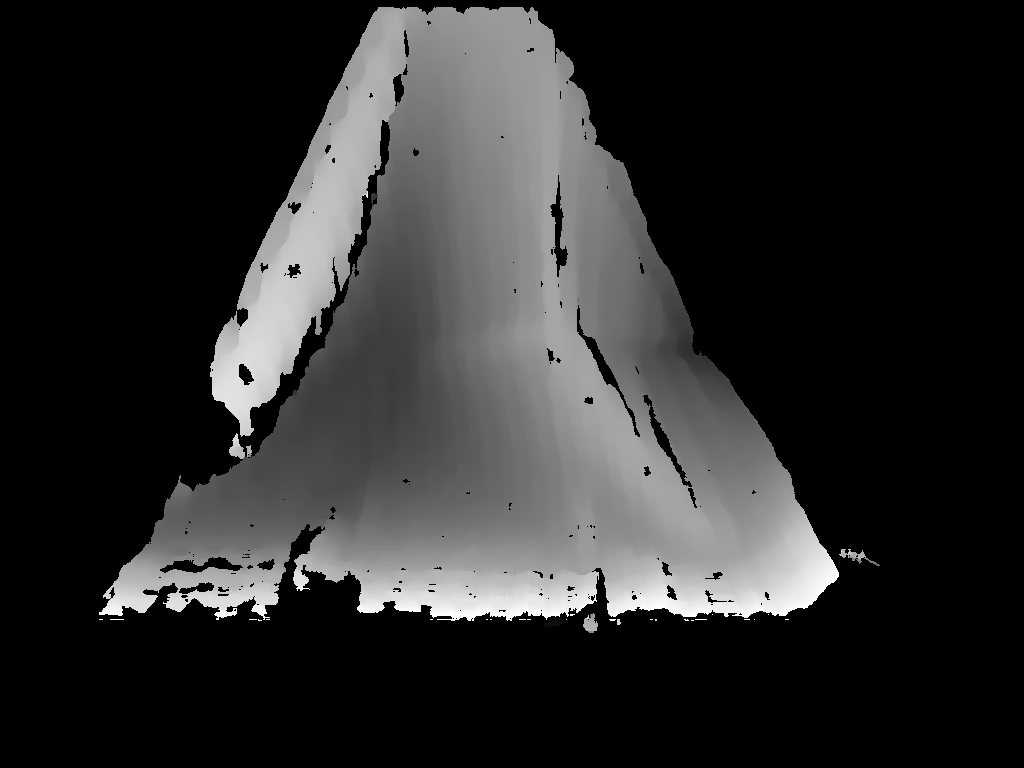
The Digiclops provided three images (right, top and left), each at 1024x768. Stereo processing was performed on greyscale images using the Triclops SDK. Images were rectified, low-pass filtered, and edge-filtered. Stereo correspondence was performed on the images, and points were validated using a median filter. The full list of parameters used is shown in Table 1. After processing with the Triclops SDK, the final output of the capture process was a colour image, a depthmap, and a mask indicating the valid pixels. All outputs are shown from the right camera's view in Figure 1.
 |
 |
 |
 |
Subpixel interpolation was used, but had some definite disadvantages. Stereo correspondence algorithms are limited to a maximum precision of one pixel. This leads to quantisation of the depth data, yielding a coarse, jagged appearance. Subpixel interpolation attempts to solve this problem by interpolating depth values to produce a smoother surface. Unfortunately, high contrast edges of the cloth gave rise to errors in the interpolated depth data, as seen in Figure 2. These ridges are not present in the actual geometry of the cloth. A flat sheet of paper with a checkerboard pattern produced similar artefacts.
![\begin{figure}\centering\includegraphics[width=4cm]{quantc}
\includegraphics[width=4cm]{quantd}
\end{figure}](img6.png) |
For the purposes of this paper, these ridges are accepted as a source of error. For more accurate results, they should be filtered out, or some other technique should be used to deal with quantisation errors. It remains uncertain whether the errors are caused by subpixel interpolation, or if they were already present in the data and were simply more obvious after interpolation.