Next: 3 Condition Functions Up: Implementing Baraff & Witkin's Previous: 1 Introduction
In this paper, I will use the symbol ![]() to denote an identity matrix. The
symbol
to denote an identity matrix. The
symbol ![]() refers to a vector containing the
refers to a vector containing the ![]() th column of the identity
matrix. To
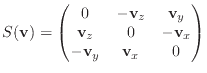
denote the skew-symmetric matrix form of a vector cross product, I will use
the notation
th column of the identity
matrix. To
denote the skew-symmetric matrix form of a vector cross product, I will use
the notation
I will also define the vector
![]() as the transpose of the
as the transpose of the
![]() th row of
th row of
![]() .
. ![]() is a column vector, but represents
a row in the original
is a column vector, but represents
a row in the original ![]() matrix.
I will use a hat (e.g.
matrix.
I will use a hat (e.g.
![]() ) to refer to a normalised vector of unit
length, and omit the hat (e.g.
) to refer to a normalised vector of unit
length, and omit the hat (e.g. ![]() ) for an unnormalised vector. This is
the opposite convention to that used in my original project report.
) for an unnormalised vector. This is
the opposite convention to that used in my original project report.
I will retain Baraff & Witkin's notation and use ![]() to refer to the
positions of points, not
to refer to the
positions of points, not ![]() as in Macri's paper. Furthermore,
I will refer to the points of a triangle as
as in Macri's paper. Furthermore,
I will refer to the points of a triangle as ![]() ,
, ![]() and
and ![]() , and
not use the
, and
not use the ![]() ,
, ![]() and
and ![]() subscripts used by the other two papers. For
the points of an edge, I will likewise use subscripts of 0, 1, 2, and 3 rather
than the
subscripts used by the other two papers. For
the points of an edge, I will likewise use subscripts of 0, 1, 2, and 3 rather
than the ![]() ,
, ![]() ,
, ![]() and
and ![]() subscripts used by Macri.
subscripts used by Macri.
When referring to points, I will use ![]() and
and ![]() to refer to two
possibly distinct points. I will use the subscript
to refer to two
possibly distinct points. I will use the subscript ![]() to refer to the
to the
to refer to the
to the ![]() th component of
th component of ![]() , and likewise the subscript
, and likewise the subscript ![]() for
the
for
the ![]() th component of
th component of ![]() . I will also sometimes use subsubscripts of
. I will also sometimes use subsubscripts of ![]() ,
,
![]() and
and ![]() to refer to the components.
to refer to the components.
I like to think of the derivatives in this paper in terms of their components. Both Baraff & Witkin and Macri differentiate with respect to a vector in their papers, giving quantities like
 |
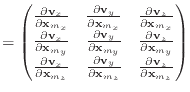 |
This type of formula is common in some areas of graphics; for example, the
Jacobian matrix has this form. However, what happens when we take the second
derivative of ![]() ? It will yield a third-order tensor, a
? It will yield a third-order tensor, a
![]() linear algebraic quantity. However, this is unnecessarily
complicated, especially for people (like me) who never covered tensors in
their undergraduate education. In this paper, I will try to avoid
differentiation with respect to a vector. Instead, I will do most of the work
on a component-by-component basis, using only differentiation with respect to
a scalar. Using this approach, I will only ever need to use vectors and
scalars, not matrices or higher-order tensors. This makes operations such as
cross-products and dot-products straightforward.
linear algebraic quantity. However, this is unnecessarily
complicated, especially for people (like me) who never covered tensors in
their undergraduate education. In this paper, I will try to avoid
differentiation with respect to a vector. Instead, I will do most of the work
on a component-by-component basis, using only differentiation with respect to
a scalar. Using this approach, I will only ever need to use vectors and
scalars, not matrices or higher-order tensors. This makes operations such as
cross-products and dot-products straightforward.
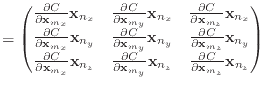
Some of Baraff & Witkin's formulas involve taking a second derivative with respect to two vectors. For these, just remember the layout of the resulting matrix. For example,
 |
 |